3D Object Detection
Developed a pipeline to detect 3D Bounding Boxes from LiDAR points in an unsupervised fashion

I follow the philosophy of working hard so as to make life easy. Driven by this, I like to work smart and differently. My research interests lie in the field of Computer Vision and Robotics. Possess an enthusiasm for learning new skills and technology.
Developed a pipeline to detect 3D Bounding Boxes from LiDAR points in an unsupervised fashion

Low-level and Mid-Level Visual Fusion of 3D LiDAR points with the 2D Object detection
Development of an underwater simulator which will be used for oysters detection for the project

Detected AR Tag in the video and superimposed an image on top of it
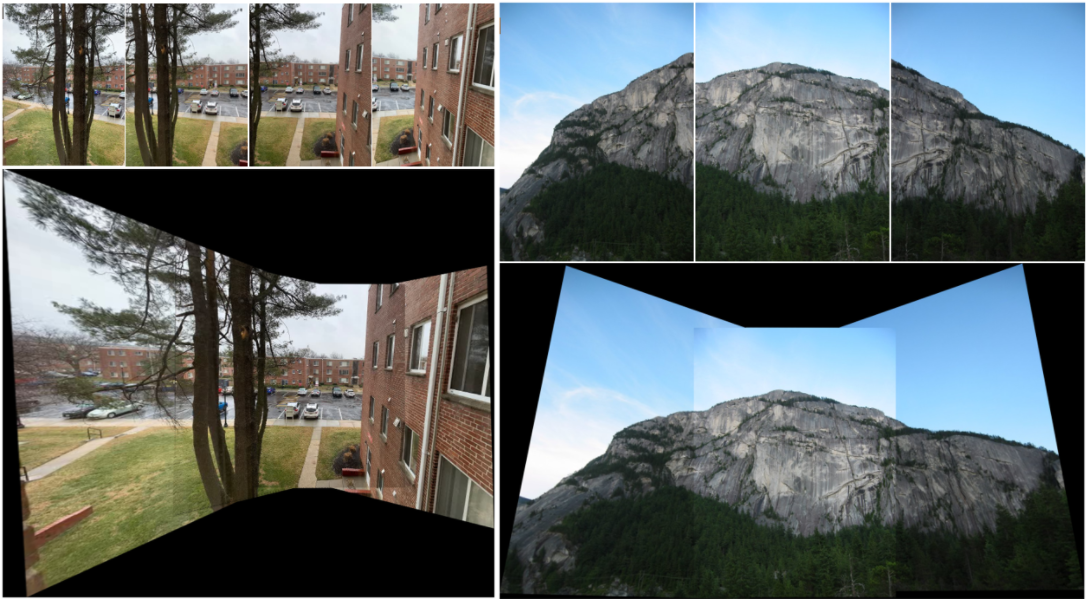
Panoramic image stitching using Classical and Deep Learning approaches

Modelled and simulated a 7 degree of freedom mobile robot to serve customers in a restaurant environment
A ROS C++ package for Swarm of 20 robots(TurtleBot3) to perform a search and rescue operation
Implemented Dijkstra path planning algorithm. Clearance distance from obstacles set dyanmically during run-time
Feel free to contact me. I would love to hear from you. Any comment or feedback is appreciated.